Ob koncu 19. stoletja, ko so se začela uporabljati kolesa, je bilo treba zanje pridobiti vozniško dovoljenje. Sestavljen je bil ugleden odbor za poučevanje teorije in prakse vožnje ter izdajo registrskih tablic. Nikomur ni bilo dovoljeno izročiti vozila. Razlog za previdnost je bilo večje tveganje pri vožnji dvokolesnika. Navaden človek ne more razumeti, zakaj se kolo med vožnjo ne prevrne. Presenetljivo je, da tudi fiziki, ki preučujejo delovanje kolesnih sistemov, ne morejo nedvoumno odgovoriti na to preprosto vprašanje.
Teoretične analize in fizikalni poskusi so pokazali, da giroskopski moment in pozitivni hod vilic ne zadostujeta za stabilnost kolesa. Poleg nadzorovanega krmiljenja je na voljo tudi samodejno krmiljenje. Poleg tega ima porazdelitev obremenitve ključno vlogo pri ohranjanju ravnovesja. Kot lahko vidite, se zaradi precej dolge življenjske dobe kolesa še vedno odkrivajo in izpopolnjujejo nove lastnosti.
Zakaj se kolo med vožnjo ne prevrne
Za razlago enostavne naloge se pogosto uporablja prispodoba: “To je tako preprosto kot vožnja s kolesom”. Pravzaprav je treba poskrbeti, da prevozno sredstvo ne pade. Sprva je veljalo, da se kolo vozi na račun kolesarja. Oseba zazna nagib konstrukcije, rahlo zasuka krmilo v smeri padca in izravna vožnjo. Pri visoki hitrosti pa kolo pridobi stabilnost in ne pade, tudi če spustite krmilo. Kasneje so se pojavile hipoteze o žiroskopskem delovanju sprednjega kolesa in krmiljenja. Vendar se je izkazalo, da tudi kolesa brez vodenja in robotski kolesarji ne padajo.
Glavno vprašanje o vzroku stabilnosti je: kaj povzroča ustrezno razmerje med nagibom in obratom? Splošno sprejeto mnenje je, da je učinek posledica rotacijskega (žiroskopskega) navora in pozitivnega dosega vilic. Stabilizacijsko delovanje sprednjega kolesa in centrifugalna sila, ki nastane zaradi odklona gibanja od ravne poti, sta nujna dejavnika pri ravnotežju kolesa.
Z vidika fizike
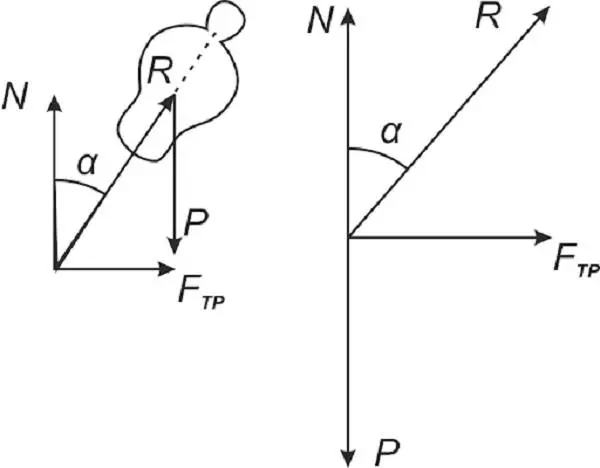
Znanstveniki so odkrili vzorec, ki ohranja stabilnost dvokolesnikov. Prednja vilica je v središču pozornosti. Ureditev vključuje nagibanje osi krmila glede na podlago. Točka križišča je pred linijo stika kolesa s cesto. Če kot krmilnika odstopa od nastavljene vrednosti, se ustvari reakcijska sila, ki transporter vrne v prvotni položaj. Tako kolo pomaga ohranjati ravnotežje.
Za zavoj mora kolesar spremeniti težišče. Ko je na primer kolo nagnjeno v desno, je tudi sprednja os nagnjena v desno in kolo, ki se vrti v smeri urinega kazalca (gledano od spodaj), delno prenese reaktivni navor na krmilno enoto. Zaradi centrifugalne sile se volan obrača v desno. Kolesar se pri zavijanju nagne v levo, pri čemer se kolo in kolesa odklonijo v desno.
Drugi dejavnik, ki se uporablja za stabilizacijo vozila, je pridobivanje hitrosti med upočasnjevanjem in krmiljenjem. Stabilizacija vrne kolesa v pravilen položaj in prepreči, da bi se kolo prevrnilo. Izkušeni kolesar z rokami na pritrdilnih točkah krmari 2-3 mm v cesto.
Žiroskopski učinek
Teorija ravnotežja temelji na dobro znanem fizikalnem pojavu, ki se uporablja v vesolju, letalstvu in pomorski navigaciji. Lastnost vrtečega se predmeta, da ohranja smer gibanja, se imenuje žiroskopska sila. To je mogoče opaziti pri vožnji z nagnjenim kolesom. Dokler se kolesa vrtijo, vozilo ohranja ravnotežje in se nikoli ne prevrne. Na primer, julček ali otroški helikopter “deluje” le, ko se vrti. Da bi preverili hipotezo, so fiziki izdelali posebno obliko kolesa. Spredaj je bilo nameščeno dodatno kolo, ki se ni dotikalo tal in se je vrtelo v nasprotni smeri. Rezultat poskusa je znanstvenike presenetil. Kolo se je popolnoma premikalo in ni padlo brez žiroskopa.
Po potrditvi glavnih dejavnikov, ki vplivajo na stabilnost dvokolesa v gibanju, znanstveniki še vedno razpravljajo o novih različicah.
Zanimiva dejstva
V.A. Jakubovič
- Matematično teorijo, ki pojasnjuje stabilnost kolesa v gibanju, je predstavil doktor znanosti V. A. Jakubovič. Znanstvenik je pojasnil, zakaj avtonomni robot, ki bi upravljal kolo, še ni bil ustvarjen. Informacije o mehanskih kolesarjih, ki so krožile po internetu, so se izkazale za lažne. Podrobnejši pogled na kibernetika je razkril številne trike. Izumitelji so pritrdili uteži, da so povečali stabilnost konstrukcije, znižali težišče in pospešili vožnjo kolesa do visokih hitrosti.
Nasprotniki znanstvenika dokazujejo nasprotno. Robot se zelo hitro uči. To je posledica relativne preprostosti nalog: naučiti se morate le, kako ohraniti ravnotežje. Ima sposobnost, ki je ljudje nimamo: odziva se takoj in petkrat na sekundo “premakne” kolo.
- Kolo brez kolesarja se lahko samodejno usmerja, da se ne prevrne,” trdijo ameriški znanstveniki. Z linearnimi izračuni stabilnosti so raziskovalci zasnovali kolo z dodatnimi kolesi, ki se vrtijo v nasprotno smer, in negativnim položajem krmila.
- Pogled psihologov se razlikuje od pogleda fizikov. Viri energije kolesa so v kolesarjevi glavi. Človeški možgani se zelo trudijo, da ne bi padli. Kolesarjevo ravnotežje ohranja podzavest.
Zaključek
Dokazi potrjujejo pomen žiroskopa in koleščka za ohranjanje stabilnosti kolesa med vožnjo. Vendar ni jasne razlage, zakaj se kolo med vožnjo ne prevrne. Morda obstaja dodatna sila, katere razumevanje začasno presega sedanje znanje.






Kljub temu menim, da se kolo med vožnjo ne prevrne, ker voznik ohrani ravnotežje in ga popravi z obračanjem krmila v smeri padca. Učinek žiroskopskega navora na kolo med vožnjo je malo verjeten, hitrost kolesa in masa kolesa nista dovolj velika, da bi ustvarila reaktivni navor.
Poskus s krmiljenjem ni potrdil, da voznik drži ravnotežje. Če kolo brez kolesarja močno potisnete, bo vozilo vozilo vozilo in se ne bo prevrnilo, tudi če je krmilo zataknjeno.